
Convolutional Networks — Intuitively and Exhaustively Explained
Unpacking a cornerstone modeling strategy


Convolutional neural networks are a mainstay in computer vision, signal processing, and a massive number of other machine learning tasks. They’re fairly straightforward and, as a result, many people take them for granted without really understanding them. In this article we’ll go over the theory of convolutional networks, intuitively and exhaustively, and we’ll explore their application within a few use cases.
Who is this useful for? Anyone interested in computer vision, signal analysis, or machine learning.
How advanced is this post? This is a very powerful, but very simple concept; great for beginners. This also might be a good refresher for seasoned data scientists, particularly in considering convolutions in various dimensions.
Pre-requisites: A general familiarity of with backpropagation and dense neural networks might be useful, but is not required. I cover both of those in this post:

The Reason Convolutional Networks Exist
The first topic many fledgling data scientists explore is a dense neural network. This is the classic neural network consisting of nodes and edges which have certain learnable parameters. These parameters allow the model to learn subtle relationships about the topics they’re trained on.

As the number of neurons grow within the network, the connections between layers become more and more abundant. This can allow complex reasoning, which is great, but the “denseness” of dense networks presents a problem when dealing with images.
Let’s say we wanted to train a dense neural network to predict if an image contains a dog or not. We might create a dense network which looks at each pixel of the image, then boil that information down to some final output.
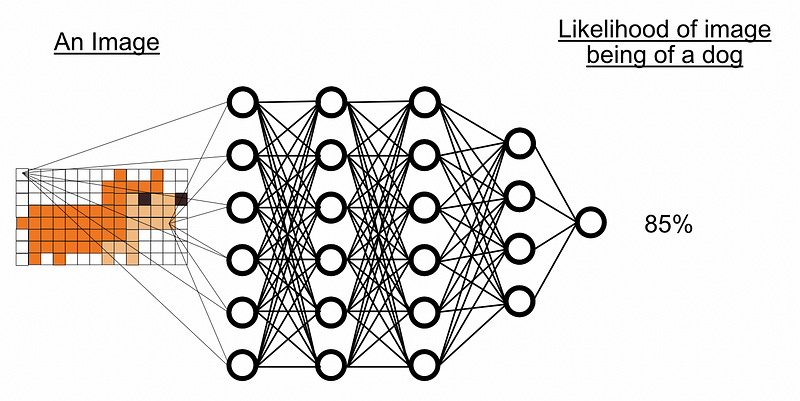
Already we’re experiencing a big problem. Skipping through some math to get to the point, for this tiny little network we would need 1,544 learnable parameters. For a larger image we would need a larger network. Say we have 64 neurons in the first layer and we want to learn to classify images that are 256x256 pixels. Just the first layer alone would be 8,388,608 parameters. That’s a lot of parameters for a, still, pretty tiny image.
Another problem with neural networks is their sensitivity to minor changes in an image. Say we made two representations of our dog image; one with the dog at the top of the image, and one with the dog at the bottom.

Even though these images are very similar to the human eye, their values from the perspective of a neural network are very different. The neural network not only has to logically define a dog, but also needs to make that logical definition of a dog robust to all sorts of changes in the image. This might be possible, but that means we need to feed the network a lot of training data, and because dense networks have such a large number of parameters, each of those training steps is going to take a long time to compute.
So, dense networks aren’t good at images; they’re too big and too sensitive to minor changes. In the next sections we’ll go over how convolutional networks address both of these issues, first by defining what a convolution is, then by describing how convolution is done within a neural network.
Convolution in a Nutshell
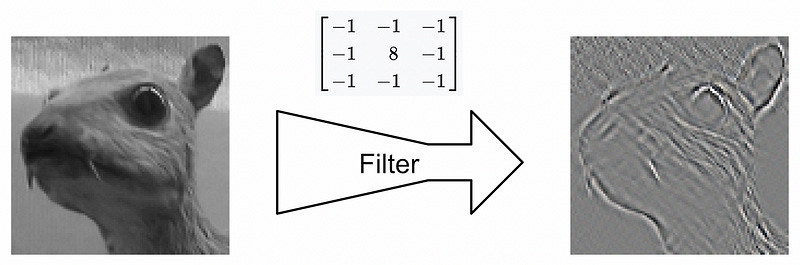
At the center of the Convolutional Network is the operation of “convolution”. A “convolution” is the act of “convolving” a “kernel” over some “target” in order to “filter” it. That’s a lot of words you may or may not be familiar with, so let’s break it down. We’ll use edge detection within an image as a sample use case.
A kernel, from a convolutional perspective, is a small array of numbers

This kernel can be used to transform an input image into another image. The act of using a standard operation to transform an input into an output is typically called “filtering” (think Instagram filters used to modify images).
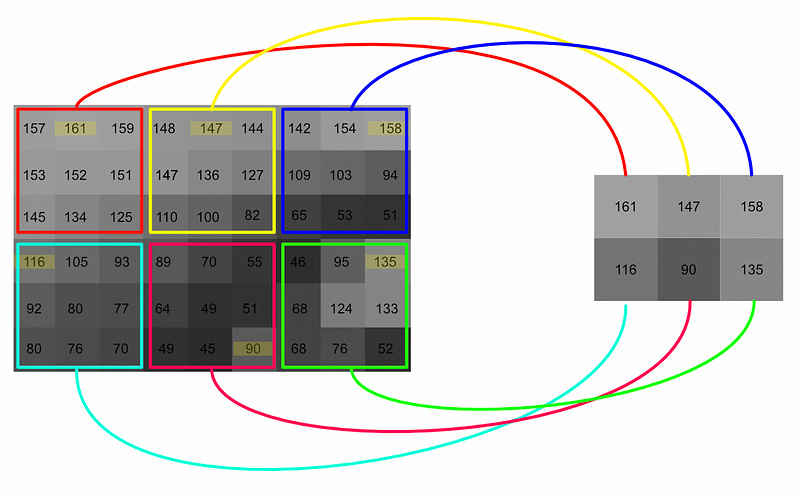
The filtering actually gets done with “convolution”. The kernel, which is much smaller than the input image, is placed in every possible position within the image. Then, at a given location, the values of the kernel are multiplied by values of the input image. The results are then summed together to define the value of the output image.

In machine learning convolutional is most often applied to images, but they work perfectly well in other domains. You can convolve a wavelet over a one dimensional signal, you can convolve a three dimensional tensor over a three dimensional space. Convolution can take place in an arbitrary number of dimensions.

We’ll stay in two dimensions for most of this article, but it’s important to keep the general aspect of convolutions in mind; they can be used for many problem types outside of computer vision.
So, now we know what convolution is and how it works. In the next section we’ll explore how this idea can be used to build models.
Convolutional Neural Networks in a Nutshell
The whole idea of a convolutional network is to use a combination of convolutions and downsampling to incrementally break down an image into a smaller and more meaningful representation. Typically this broken down representation of the image is then passed to a dense network to generate the final inference.

Similarly to a fully connected neural network which learns weights between connections to get better at a task, convolutional neural networks learn the values of kernels within the convolutional layers to get better at a task.

There are many ways to downsample in a convolutional network, but the most common approach is max pooling. Max pooling is similar to convolution, in that a window is swept across an entire input. Unlike convolution, max pooling only preserves the maximum value from the window, not some combination of the entire window.
So, through layers of a convolution and max pooling, an image is incrementally filtered and downsampled. Through each successive layer the image becomes more and more abstract, and smaller and smaller in size, until it contains an abstract and condensed representation of the image.
And that’s were a lot of people stop in terms of theory. However, convolutional neural networks have some more critical concepts which people often disregard. Particularly, the feature dimension and how convolution relates with it.
⚠️ Epilepsy Warning: The following sections contain rapidly moving animations⚠️
The Feature Dimension
You might have noticed, in some of the previous examples, we used grayscale images. In reality images typically have three color channels; red, green, and blue. In other words, an image has two spatial dimensions (width and height) and one feature dimension (color).
This idea of the feature dimension is critical to the thorough understanding of convolutional networks, so let’s look at a few examples:
Example 1) RGB images
Because an image contains two spatial dimension (height and width) and one feature dimension (color), an image can be conceptualized as three dimensional.

Generally, convolutional networks move their kernel along all spatial dimensions, but not along the feature dimension. With a two dimensional input like an image one usually uses a 3D kernel, which has the same depth as the feature dimension, but a smaller width and height. This kernel is then swept through all spatial dimensions.
Typically, instead of doing one convolution, it’s advantageous to do multiple convolutions, each with different kernels. This allows the convolutional network to create multiple representations of the image. Each of these convolutions uses its own learnable kernel, and the representations are concatenated together along the feature axis.
As you may have inferred, you can have an arbitrary number of kernels, and can thus create a feature dimension of arbitrary depth. Many convolutional neural networks use a different number of features at various points within the model.

Max pooling typically only considers a single feature layer at a time. In essence, we just do max pooling on each individual feature layer.

Those are the two main operations, convolution and max pooling, on a two dimensional RGB image.
Example 2) Stereo Audio
While time series signals like audio are typically thought of as one dimensional, they’re actually typically two dimensional, with one dimension representing time and another dimension representing multiple values at that time. For instance, stereo audio has two separate channels, one for the left ear and one for the right ear.

This can be conceptualized as a signal with one spatial dimension (time) and one feature dimension (which ear).

Applying convolutions and max pooling to this data is very similar to images, except instead of iterating over two dimensions, we only iterate over one.

Max pooling is also similar to the image approach discussed previously. We treat each row across the feature dimension separately, apply a moving window, and preserve the maximum within that window.

Example 3) MRI/CT scans
Depending on the application, data of scans can be conceptualized as three dimensional or two dimensional.

{kind=link}

The example from the piece of paper can be treated as a 2D spatial data problem with a feature dimension representing depth. It’s really three dimensional, the paper has some thickness which is recorded by the CT scan, but the depth dimension is minor enough that it can be treated as a feature dimension. This would be just like our image example, except instead of a layer for every color, we would have a layer for every physical layer of data.
For the fully three dimensional scan of a human head, where it may not be useful to think of it as a flat object but as a full three dimensional object, we can use three dimensional convolution and max pooling. This is conceptually identical to the previous methods, but much harder to draw. We would do convolve over all three spatial dimensions, and depending on the number of kernels we employ, we would get a four dimensional output.

Technically there’s no limit to the dimensionality of convolutional networks. You could do convolution in five, six, or one thousand dimensions. I think three was already hard enough, and the vast majority of convolutional models work on two dimensional data anyway, so we’ll end our example exploration here.
By this point you may have some fundamental questions like “do kernels always have to be a certain size”, or “do kernels always have to overlap?” We’ll cover questions like that in the next question.
Kernel Size, Stride, and Padding
While we previously considered all kernels to be of size three, there’s no limit to the size of a convolutional kernel. This configurable size is often referred to as the kernel size.

I’ve also idealized all convolutions as only stepping one point at a time, but convolutions can step larger amounts, which is referred to as stride. Max pooling also has a stride parameter, which is often the size of the max pooling window. This is why I depicted max pooling as not overlapping.

Sometimes it’s advantageous to have the output size of a convolution equal to the input size of a convolution, but because kernels are typically larger than size one, any result of a convolution will necessarily be smaller than the input. As a result we can “pad” the borders of an image with some default value, maybe even a reflection of the input, in order to get an output that’s similarly sized. This general process is called padding.
Non Linear Activation Functions
Part of the thing that makes neural networks, in general, learn complex tasks is non-linearity. If we don’t use activation functions then, at the end of the day, convolutions can only create linear relationships (combinations of addition and multiplication). If we throw some activation functions in the mix, which map some input into an output non-linearly, we can get our convolutional network to learn much more complex relationships. The most common activation function used in convolutional networks is ReLu.
Typically, activation functions are applied after convolution and before max pooling, so something like this:
output = maxPool(relu(conv2d(input))However, while it’s not a big difference, it is slightly more performant to swap maxPool and activation, which doesn’t end up impacting the final output.
output = relu(maxPool(conv2d(input))regardless of how it’s done, adding non-linear activation functions within a model greatly increases the models ability to learn complex tasks.
Flattening and Dense Nets
Convolutional networks are good at breaking data down into it’s essence, but dense networks are better at doing logical inference. After passing data through a convolutional network, the data is often “flattened” then passed through a dense network.

I have more information on the role of dense networks as “projection heads” in the following article:
Self-Supervised Learning Using Projection Heads

In this post you’ll learn about self-supervised learning, how it can be used to boost model performance, and the role projection heads play in the self-supervised learning process. We will cover the intuition, some literature, and a computer vision example in PyTorch.
Conclusion
And that’s it! I wouldn’t say we went over every possible approach or theory of convolutional networks (that would be a pretty long article), but we covered the theory necessary to understand pretty much every approach that exists. You should have an idea of why conv nets are better than dense nets for some applications, what a kernel is, what convolution is, and what max pooling is. You should have an understanding of the feature dimension and how it’s used across various 1D, 2D, and 3D use cases. You should also understand key parameters, like kernel size, padding, and stride.

Attribution: All of the resources in this document were created by Daniel Warfield, unless a source is otherwise provided. You can use any resource in this post for your own non-commercial purposes, so long as you reference this article, https://danielwarfield.dev, or both. An explicit commercial license may be granted upon request.
I would be thrilled to answer any questions or thoughts you might have about the article. An article is one thing, but an article combined with thoughts, ideas, and considerations holds much more educational power!